







卵やブルーベリーなどの繊細な物体を壊さずに持ち上げられるロボットを構築するには、人間の触覚を模倣する高度なビジョンシステムやセンサーのフィードを処理する多くの制御アルゴリズムが必要でした。 もう1つの方法は、一般的に強度と耐久性が限られたロボットを意味するソフトロボット工学の領域に飛び込むことでした。
ハーバード大学の研究チームは、センサーもなく制御システムもまったくないシンプルな油圧グリッパーを使った研究を発表しました。 彼らに必要なのは、シリコーンオイルと多くの小さなゴムボールだけでした。 その過程で、彼らは圧力に対するプログラム可能な反応を持つメタ流体を開発しました。
水泳ゴム球
「私はフランスで古い貝殻を泳ぐ方法で博士号を取得しました。 それを泳ぐために私たちはそれを崩していました。 それはまるで [inverted] クラゲです。」 「私は上司に「この球を注射器に入れて圧力を上げるとどうなりますか?」と言いました。 彼はそれが興味深いアイデアではなく、これは役に立たないだろうと言いました」とDjellouliは主張しています。 しかし数年後、Djellouliは彼の興味を共有するベルギールーベン大学の機械工学教授Benjamin Gorissenに会った。 「私は実験をすることができ、彼はシミュレーションをすることができたので、私たちは一緒に何かを提案できると思いました」とDjellouliは言います。 したがって、Djellouliのゴム球がついに注射器に入った。 そして結果はまったく予期しなかったものでした。
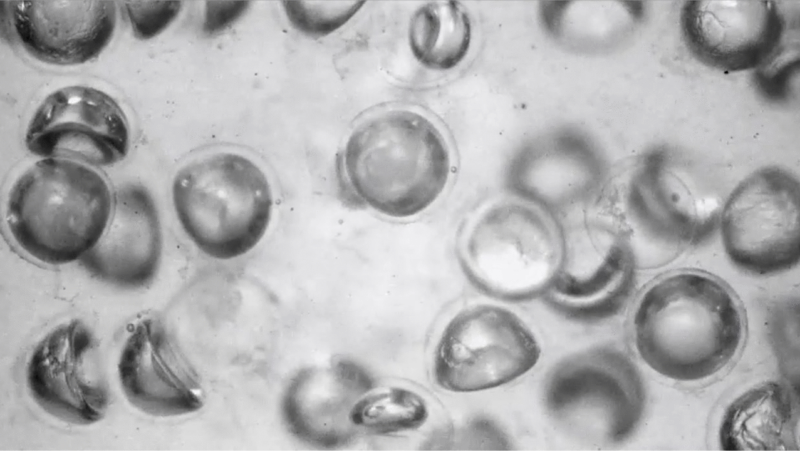
球の半径は10mmで、厚さ2mmのシリコーンゴムの壁が空気ポケットを囲んでいます。 水300mlを入れた容器に入れました。 容器内の圧力が増加し始めると、120kPaの球が曲がり始めました。 バックルが曲がり始めると、流体が占める容積が絶えず低下しても、圧力はしばらく比較的安定したままであった。 球状の液体はもはや水のように機能しませんでした。 圧力/体積曲線がはっきりと安定した状態を維持しました。 「自然には存在しない調整可能な特性を持つ液体であるメタ流体は、次のように理論化されました。 フェデリコ・カパッソと同僚、負の屈折率の液体を得たいと思った人。 当時、彼らは光学系で始まりましたが、このゴム球を含む水の挙動を観察しながら、私たちが持っているのがメタ流体であることがわかりました」とDjellouliは言います。
プログラム可能な流体混合
ゴムビーズの1つを水に浸すことはただ始点に過ぎませんでした。 「私はいつもこんな考えを頭の中に抱いていました。 DjellouliはArsに言いました。圧力を調整することができます。球をより厚くすると、曲げるのに多くのエネルギーが必要になるため、活性化圧力が高くなります」とDjellouliは説明します。
メタ流体内で目的のプロパティをプログラムするために変更できる他のパラメータがあります。 これには、基本的に、体積分率と球体の構造が含まれ、全体の流体体積のうち球が占める量である。 つまり、大きさや厚さの異なる球を入れると、流体が異なる動作をするからです。 さまざまな属性を持つフレーズを混在させることもできます。 「球の大きさと厚さの変化が非常にタイトな場合、それは活性化されたときに非常に平らな圧力安定器を持つでしょう。 分布が広い場合は、バックルを外した状態からバックルのない状態に切り替える方がスムーズになります。」とDjellouliは言います。 異なる球混合物を使用することにより、1つの流体において異なる圧力で複数のプラトーが可能になる。 「この方法で圧力/体積曲線を正確に調整できます」とDjellouliは付け加えます。
彼のチームは、これらの曲線を調整することで、センサーや制御システムなしで動作するスマート油圧グリッパーを構築することができました。






+ There are no comments
Add yours