





削減後の株式の上昇:市場概要")

ジョナサン・アモス科学特派員

 JAXA
JAXA日本の月着陸船が月面に歴史的な着陸をした時、結局鼻にぶつかりました。
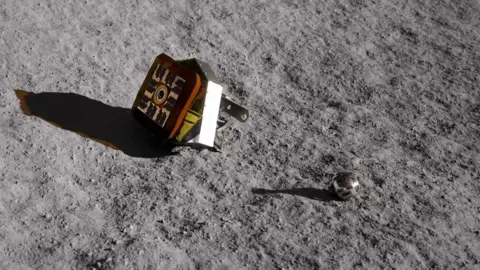
破損したスリム宇宙船の最初の写真は、宇宙船が元の位置から90度回転した様子を示しています。
これは、動作に必要な電気を製造するのに困難があったことを説明するのにある程度役立つだろう。
この画像は、先週土曜日のタッチダウン直前にSlimから放出された野球ボールサイズの小型ロボットSora-Qによってキャプチャされました。
日本宇宙局Jaxaは声明を通じて「主エンジンの異常が宇宙船の着陸姿勢に影響を及ぼした」と明らかにした。
Slim(月探査用スマート着陸船)の大型推進機の2つのうちの1つが下降中に動作を停止したようです。
 作詞
作詞写真を地球に転送するために、Sora-Qは最初に2番目に放出された移動ロボットLunar Excursion Vehicle 1またはLev-1に写真を転送する必要がありました。 このホッピングロボットには、Slimとは無関係にミッションコントロールルームに連絡できるワイヤレス機器があります。
着陸船自体は太陽電池が作動せず、到着後3時間で停止した。 バッテリーが急速に消費され、Jaxaの関係者はSlimを休止状態にすることにしました。
Sora-Qのイメージを通して実証されているように見える彼らの仮定は、主な宇宙船が太陽電池が太陽を見るのを妨げる方向を持っているということです。
着陸地点で照明角度が変わったときにスリムを目覚めさせることが希望です。
 JAXA
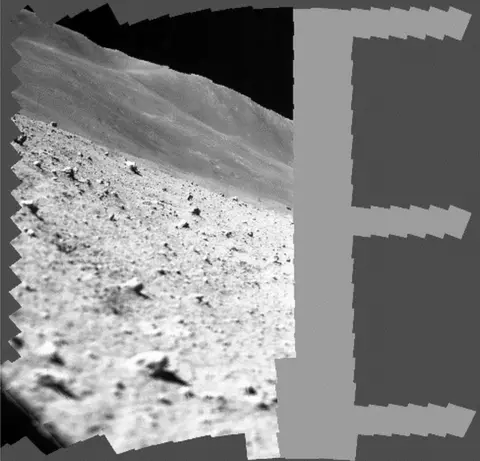
JAXA休止状態の前に、コントローラは内蔵赤外線カメラで撮影した一連の表面写真をインポートできました。
これは、宇宙船が小さな岩に囲まれた斜面にあることを示しています。
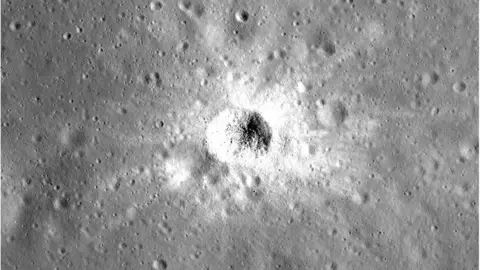
Slimの着陸地点はShioliと呼ばれる赤道クレーターの端です。
日本標準時(15:20 GMT)の土曜日00:20に着陸することで、Jaxaはアメリカ、旧ソ連、中国、インドに続いて月にソフトタッチダウンを達成した第5国の宇宙局となりました。
統計的に月面に滑らかに下げることは非常に難しいことが証明されています。 すべての試みの約半分だけが成功しました。
 作詞
作詞Jaxaは新しい精密ナビゲーション技術を信じています。
着陸船に搭載されたコンピュータは、着陸地点に到達したときに発生する可能性があるリスクを防ぐために、迅速な画像処理とクレーターマッピングを使用しました。
エンジニアは目標位置から100m(330フィート)以内に移動したいと考えました。 これが達成されました。
Jaxa氏は、「電力を遮断する前に収集したデータを分析した結果、Slimがもともと目標着陸地点から東に約55m離れた月面に到達したことが確認された」とJaxa氏は付け加えた。 障害物を避けるために、工芸品を片側に移動します。
これは、両方の探査機の成功と同様に、関係者を喜ばせるでしょう。 Sora-Qは月面を移動して写真を撮っただけでなく、Lev-1も飛び上がることに成功しました。 Slimと同様、Lev-1も電源を切った。
「Lev-1の月面飛躍の動き、Lev-1とSora-Q間のロボット間通信、完全自律運転の達成は画期的な成果です。今後の月探査のための貴重な技術実証とみなされます」 獲得した知識と経験を今後の任務に活用する予定だ」と明らかにした。
 NASA/LRO
NASA/LRO


_0.jpg?h=0429cc9e&itok=UAZ5KAPM "オッペンハイマー、「バーベンハイマー」撃分後8ヶ月ぶりに日開封 – 芸能通信")

+ There are no comments
Add yours