







防衛展示会にますます参加している日本防衛産業と国防部は、主に新しい水陸両用攻撃車両と新しいハイブリッド推進ソリューション開発を目指す研究プログラムに参加しています。
1960年代から陸上防衛産業が国家設計装甲車(最初のType 61主力戦車(MBT))開発のために始まった。です。 同じ10年後期の16機動戦闘車両。
この目的のために、タイプ10のための一連の新技術が開発されました。 モビリティゾーンには、1,200馬力を提供する小型1,200の8気筒エンジン、無段変速機(CVT)、車両の高さ、ピッチ、ロールを変更するための水圧サスペンションが含まれています。 角度と軽量トラック、新しいAPFSDS弾薬、自動装填システムが開発され、火力を高め、乗組員を3人に減らしました。 Type 16の場合、520馬力を提供する小型4気筒エンジンが前輪駆動パワートレインおよび水圧式サスペンションとともに開発され、新しい105/52mm低反動砲システムが設計され、バレルはライセンス生産されています。 全体として、C4Iシステムは情報共有と調整を可能にする手袋資産を統合します。
1月21日から25日まで、ロンドンのトゥイックナムで開催されたDefense IQが主催した国際装甲車の会議で、日本軍が未来をどのように見ているかについての説明が提供されました。 現在、国家産業と軍事機関は2つの主要な開発分野を検討しています。 1つは南西部地域で作戦できる有人および無人水陸両用車の必要性である。 ここでは約200の島が危険にさらされており、東京は敵の動きを予想したり、敵軍が侵略された場合にこれを奪還しなければなりません。 新技術の2番目の関心領域はモビリティの一部であり、オンボード電力の需要増加、消費削減ニーズ、モビリティ、およびステルス改善ニーズに対応するための新しい推進ソリューションを検討しています。
これらのプログラムには、日本国防総省、より正確にはATLA(Acquisition Technology and Logistic Agency)が参加します。 技術優位確保及び運用需要に対する迅速な対応、効率的な国防装備確保のための事業管理、国際技術協力強化、国防技術基盤維持・強化などを担当する。 また、設備コストの削減を目指す監査機能も備えています。

日本は数年前に水陸両用問題から始まり、将来の水陸両用技術研究(Future Amphibious Technology Research)でFAT-Rという野心的なプログラムを始めました。 このプログラムの目的は、海上での操縦性の観点から、国内の水陸両用車と比較してかなり改善された新しい水陸両用車を開発するためのデータを得ることでした。 AAV-7 RAM/RSをサービスします。 新しい車両要件は、AAV-7の6.5ノットよりも速い海上巡航速度を必要とし、海岸線の地形を通過することができなければならず、ビーチに到達するとAAV-7容量は制限されています。 陸上作戦に関しては、少なくとも地上軍の一部である水陸両用迅速配置旅団である日本陸上自衛隊(JGSDF)で運用中の現在の車両と同じ性能を持たなければなりません。 予想総車両重量(GVW)は、現在追跡されている水陸両用車両の26トンに比べて40トンに達しません。 公害状態で航海性を維持しなければならず、AAV-7はSea State 3巡航に制限されます。
FAT-Rプログラムは2017年にシミュレーションモデルとして始まり、翌年には高速技術が研究の一部になり始めました。 2019年、日本は米国と力を合わせ、2011年初めに中断された遠征戦闘車両(EFV)開発プログラムで得た知識をもたらしました。 日本は主に推進分野でテストするためのいくつかのコンポーネントを提供しました。 これにより、2つの実物サイズモデル(海岸線の移動性のためのモデルと高速水速度のためのモデル)を設計した縮小モデルの開発が可能になりました。 2019年には次世代水陸両用技術(NGAT)に関する日本と米国の共同研究が始まり、まだ進行中であり、2020年には本格的なテストベッドの開発が始まりました。
説明会によると、追跡車両がサンゴ礁の海岸線を克服できるようにするには、トラックだけを使用するだけでは不十分です。 これは滑り、十分な推進力を生成せず、ウォータージェット推力にのみ当てはまります。 上昇推進力が不足している。 したがって、エンジンによって生成された利用可能な電力が推進システム、トラック、およびウォータージェットの両方で十分なエネルギーを生成するのに十分な場合、これら2つの組み合わせのみがこの問題に対処できます。 これがAAV-7がすることですが、移動システムを駆動する525馬力は日本が求める性能を確保するには十分ではないようです。
これが、適切なCVTおよび送電モジュールと共に3,000馬力を提供する12気筒V型水冷式エンジンが設計された理由です。 腕に取り付けられたサスペンションと軽量ゴムトラックも意図的に開発されました。
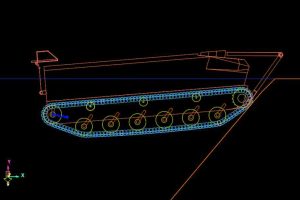
エンジンは車両の3分の1に位置し、トランスミッションは前部にあり、2つのウォータージェットは後部にあります。 シミュレーション結果によれば、エンジン出力と質量が増加しても、このソリューションを使用すると、車両が傾斜角度が50°で上面の水深が0mのサンゴ礁に対処できることがわかりました。 テスト中に上面の水深が0.5メートルであったにもかかわらず、これらの結果を確認したベッドです。
高速ソリューションについてはあまり言及されていません。 プレゼンテーションに表示された写真では、目立つトリムベーンが見え、下部構造が前方に移動し、システムが車両の長さを延ばし、ボートの流路長が直接調整されます。 最大速度に関連付けられています。 明らかに、3,000馬力エンジンと2つの1,500馬力ウォータージェットの効率は速度方程式のもう一つの主要な問題ですが、速度テストがすでに行われているかどうかは不明です。
FAT-Rの結果に基づいて、ATLAは無人水陸両用車両の研究を開始する計画であり、アイデアは複数の無人水陸両用車両を制御するための有人プラットフォームを持つことです。 後者は、死傷者を最小限に抑えるために島の奪還作戦の先駆者として使用されます。
推進のために、日本は他の多くの国と同様にハイブリッドディーゼル – 電気ソリューションを探しています。 いくつかの国で商用ソリューションを出発点として見ていますが、日本では、装甲車用ハイブリッドシステムに高いトルクと低い回転速度が必要であると考えています。 軍用と商用を区別するもう1つの問題は、環境抵抗性です。 装甲車は、粗い地形で動作するように設計されています。これは、特に追跡車両を考慮すると、振動システムに問題があることを意味します。
2011年から2016年まで、最初の研究プログラムが実施され、ディーゼル、電気、またはハイブリッドの3つのモードで動作できるシリーズハイブリッド追跡テスト車両が開発されました。 純粋な電気モードでは時速10kmの速度で1時間走行が可能だった。 同様のグレードの73型装甲車輸送車の中で、プログラムの重要な要素は、バッテリーパック、エンジン発電機、トランスデューサー、電気モーター、インバーター、駆動装置、および新しい推進システムに適した監視装置でした。 トルクの増加により加速力が大幅に向上し、燃料消費量も44%向上しました。 しかし、ブリーフィング中にミッションプロファイルに関する情報は提供されませんでした。 日本は、米国、特に米陸軍タンク – 自動車の研究、開発、エンジニアリングセンターと協力して、軌道型および車輪型ハイブリッド車両の共通テスト運用手順を確立しました。
2020年に始まり2025年末まで続くATLAで進行中の次の研究プログラムは、モジュール式高電力密度ハイブリッドシステムに関するものです。 ここでは、テスト車両には車輪があり、並列ハイブリッド推進パッケージが装備されています。 目標は、モーター発電機、バッテリーパック、インバーター/コンバーターを追加することで、比較的マイナーな変更で既存の推進システムを最大限に活用することです。 メインディーゼルエンジンを維持します。 ここでも日本は米国と協力するだろう。
写真提供:日本国防総省




+ There are no comments
Add yours